Stratégies de stabilisation pour les modèles Abaqus statiques non linéaires
Un problème courant des analyses statiques non linéaires sous Abaqus est la présence d'instabilités entraînant une non-convergence. Ces instabilités sont souvent subtiles et facilement négligées, laissant l'analyste largement ignorant des raisons de l'échec de la simulation et des corrections à apporter pour obtenir une solution convergée.
Il n'est donc peut-être pas surprenant queAbaqusPour résoudre les problèmes de modèles complexes, les utilisateurs ont souvent recours par défaut à la stabilisation automatique associée à la définition des étapes (aussi appelée stabilisation statique). Toutefois, la stabilisation automatique n'est pas une solution universelle aux problèmes d'instabilité. En effet, mal utilisée, elle peut produire des résultats irréalistes susceptibles d'entraîner des défaillances coûteuses du produit.
Pour aider les analystes à obtenir une solution convergée précise, ce blogue expliquera les instabilités et les méthodes de résolution appropriées, en se concentrant sur quand et comment utiliser les techniques de stabilisation courantes dans Abaqus/Standardpour les surmonter.
Avertissements typiques de non-convergence dans les fichiers de sortie Abaqus:

Figure 1
Comprendre et surmonter les instabilités
Il existe de nombreuses façons de surmonter les instabilités pour faciliter la convergence, mais il est essentiel de comprendre les principales sources d'instabilités et comment elles entraînent la non-convergence. Commençons par examiner quelques sources possibles de non-linéarité :
- Géométrie– Une analyse géométriquement non linéaire est une analyse dans laquelle la rigidité de la structure varie lorsqu'elle se déforme. Voici quelques exemples :
- Grandes déformations et déviations, grandes rotations, instabilités structurelles (flambage), etc.
- MatérielLa non-linéarité du matériau est due à la dépendance de la contrainte à la déformation actuelle. Voici quelques effets courants :
- Élasticité non linéaire, plasticité des métaux, fissuration, écrasement, rétrécissement, etc.
- Limite (Contact)– La variation de rigidité est discontinue en raison de la nature du contact, définie par les comportements normal et tangentiel. Le contact normal est soit établi, soit non établi, tandis que le contact tangentiel peut être ouvert, glissant ou adhérent. Ces variations de rigidité sont toujours brutales et sont donc qualifiées de discontinues.
Il est à noter que ces instabilités ont un point en commun : une modification de la rigidité. Plus la modification de la rigidité est importante, plus le risque de non-convergence est élevé.
Pour comprendre l'importance de ce point, revenons aux principes fondamentaux qui définissent un problème statique ou dynamique. En termes simples, la différence réside dans la présence d'effets d'inertie :
Équilibre dynamique
| P – I = ma | ||
| m= Matrice de masse | P= Forces extérieures | Je = Forces internes |
| un= Accélération | v= Vitesse | toi= Déplacement |
Équilibre statique
Lorsque les forces d'inertie sont faibles (ma–> 0), l'équation se réduit à la forme statique de l'équilibre.
| P – I = 0 | ||
| Je =CV + Ku | ||
| C= Amortissement | K= Rigidité | K = EMun |
| E= Module d'élasticité | MunMoment d'aire |
Dans le cadre d'une analyse statique, notez qu'il n'y a pas d'inertie et que la solution est dominée par les composantes associées à l'amortissement et à la rigidité.
Ainsi, en l'absence d'amortissement et en raison des changements soudains de rigidité lorsque la structure commence à se déformer ou que le matériau s'assouplit, la rigidité nulle entre les objets, comme les espaces de contact et le mouvement de corps rigide non contraint, rend difficile la convergence du solveur statique vers une solution.
Par conséquent, l'absence d'amortissement inhérent, associée à des changements brusques de rigidité (dus à des phénomènes comme le flambage, la flexion ou le ramollissement du matériau) ou même à l'absence totale de rigidité dans des situations comme les espaces de contact ou le mouvement de corps libre, rend souvent difficile pour le solveur statique d'atteindre une solution convergée.
Il existe trois options généralement envisagées pour surmonter ce problème :
- Une procédure dynamique implicite (quasi statique) dans Abaqus/Standard
- Une procédure dynamique dansAbaqus/Explicite
- Procédure statique avec stabilisation utilisant Abaqus/Standard
Puisque le sujet de cet article est celui des problèmes statiques non linéaires, nous nous intéressons à la troisième option : l’utilisation de la stabilisation au sein du solveur Abaqus/Standard.
Comme mentionné au début de ce billet de blogue, en raison de sa surutilisation généralisée et de ses conséquences négatives potentielles, nous devons être prudents quant au moment où la stabilisation statique est appliquée.
La stabilisation statique sert principalement à résoudre les problèmes de convergence causés par des instabilités globales ou des phénomènes modifiant la rigidité globale, tels que le flambement de la structure, le ramollissement du matériau ou le mouvement de corps rigide non contraint. Cette option est activée lors de la définition des détails de l'étape dans une procédure statique. Pour l'utiliser, vous pouvez choisir parmi les options disponibles, comme la spécification d'un facteur d'amortissement ou d'une fraction d'énergie dissipée.
- Si vous spécifiez un facteur d'amortissement, une valeur constante sera utilisée pour toute l'étape. Cette valeur est généralement choisie par tâtonnement ou en fonction de l'expérience acquise.
- Si vous choisissez d'utiliser la fraction d'énergie dissipée (le rapport entre l'énergie de stabilisation (ALLSD) et l'énergie interne totale (ALLIE) du modèle), Abaqus ajustera le facteur d'amortissement afin de maintenir ce rapport en dessous de la valeur spécifiée. La valeur par défaut est 2,0e-4. Vous pouvez également contrôler le comportement adaptatif en définissant une valeur de tolérance. Si le ratio dépasse cette valeur, Abaqus ajustera automatiquement le facteur d'amortissement par incréments successifs. Si la tolérance est fixée à 0, un facteur d'amortissement constant (basé sur la fraction d'énergie initiale) sera utilisé.
Le choix de ces options de stabilisation et leur paramétrage doivent être faits avec prudence et discernement. La dissipation d'énergie dans le modèle doit être surveillée afin de s'assurer qu'elle demeure dans des limites raisonnables. Pour ce faire, nous analysons l'historique des grandeurs de sortie : l'énergie de stabilisation (ALLSD) et l'énergie interne (ALLIE) du modèle. Cela permet de s'assurer que l'ajout de la stabilisation n'influence pas significativement le comportement physique modifié.
Le manuel d'Abaqus recommande de maintenir ALLSD en dessous de 5 % de ALLIE. Minimiser ce pourcentage d'énergie de stabilisation contribue à un comportement plus physique. L'option de stabilisation adaptative, qui ajuste le facteur d'amortissement en fonction de la convergence, est une option intéressante à envisager, car elle permet de s'assurer que les valeurs d'amortissement adaptatif utilisées n'entraînent pas un dépassement des valeurs d'énergie de déformation par rapport aux énergies de stabilisation.
En nous basant sur notre compréhension de quand et comment utiliser la stabilisation statique par étapes, nous allons maintenant nous intéresser à une autre option de stabilisation courante dans Abaqus/Standard : la fonction Stabilize des contrôles de contact utilisée avec les paires de contacts.
Pour plus de détails, consultez la figure 2 ci-dessous.
Stabilisation appliquée aux paires de contacts
Nous avons déjà évoqué le fait que le contact est une forme de non-linéarité hautement non linéaire, où l'état d'interaction entre les régions peut constamment changer – en collant, en glissant ou en s'ouvrant.
Dans les scénarios où des corps s'approchent pour établir un contact, la convergence peut s'avérer problématique avant l'engagement complet en raison de l'incapacité d'établir un équilibre.
Considérons une simulation où une force est appliquée à un poinçon sphérique pour le déplacer vers un deuxième corps. Initialement, tant qu'un espace subsiste entre les deux, le poinçon se comporte comme un corps rigide. Cela s'explique par l'absence de contact : aucune force opposée ni limite ne génère de réaction, empêchant ainsi l'atteinte de l'équilibre statique. Bien que la stabilisation soit assurée par l'ajout d'un amortissement visqueux, il est utile de se représenter, dans ce scénario, l'effet de cette stabilisation comme celui de ressorts temporairement faibles à l'interface de contact. Une force de réaction opposée se développerait alors, contribuant à l'atteinte de l'équilibre statique, ou convergence.
Un autre scénario possible est celui d'un contact total entre les objets, mais avec un mouvement relatif entre les deux surfaces de contact. Ce changement d'état peut engendrer des perturbations numériques. La stabilisation au sein du modèle de paires de contacts permet d'amortir ces perturbations, de faciliter la convergence numérique et de réduire l'instabilité.
Voici quelques conseils pour appliquer efficacement la stabilisation aux paires de contacts :
- Appliquer une stabilisation à la paire de contacts concernée.– Puisqu'une source fréquente d'instabilités dans les modèles provient des problèmes de frontière (contact), il est préférable de cibler les paires de contact nécessitant une stabilisation afin de faciliter l'établissement du contact initial. Cela permet de minimiser la quantité de stabilisation utilisée et donc de réduire le risque d'erreur.
- La stabilisation est appliquée à la paire de contacts au début de l'étape, et les utilisateurs peuvent choisir de réduire sa valeur à zéro (ou à une valeur très faible) à la fin de l'étape. Ceci est particulièrement adapté aux paires de contacts présentant un écart au début de l'étape (mouvement de corps rigide non contraint, singularité numérique des degrés de liberté, régions non connexes). Pour ce faire dans Abaqus/CAE, créer unDéfinition des commandes de contact avec Stabilisation automatique,et sur lePaire de contacts, sélectionnez la liste déroulante pour votre Contrôle des contactscomme le montre la figure 2 ci-dessous.

Figure 2
- La stabilisation est appliquée à la paire de contacts au début de l'étape, et les utilisateurs peuvent choisir de réduire sa valeur à zéro (ou à une valeur très faible) à la fin de l'étape. Ceci est particulièrement adapté aux paires de contacts présentant un écart au début de l'étape (mouvement de corps rigide non contraint, singularité numérique des degrés de liberté, régions non connexes). Pour ce faire dans Abaqus/CAE, créer unDéfinition des commandes de contact avec Stabilisation automatique,et sur lePaire de contacts, sélectionnez la liste déroulante pour votre Contrôle des contactscomme le montre la figure 2 ci-dessous.
- Vérifier les énergies– Il est recommandé de toujours vérifier l’énergie de stabilisation (ALLSD) contre l'énergie interne (ALLIE) du modèle. Il est recommandé de conserver ALLSDà moins de 5 % deALLIECependant, en pratique, vous pourriez essayer de réduire cette valeur à un niveau beaucoup plus faible (par exemple, 1 % ou même moins) tout en obtenant un modèle convergent ; il est donc judicieux de faire quelques itérations en diminuant la stabilisation.
- N'oubliez pas que la stabilisation est artificielle et que plus la quantité présente est importante, plus le risque d'erreur dans la solution globale est grand.
- Une stabilisation excessive peut aussi être néfaste. Elle peut engendrer des comportements non physiques ou une absence de convergence.
- La figure 3 montre un exemple - un graphique historique des énergies, où une stabilisation excessive est évidente à partir de la courbe d'énergie de stabilisation (ALLSD).
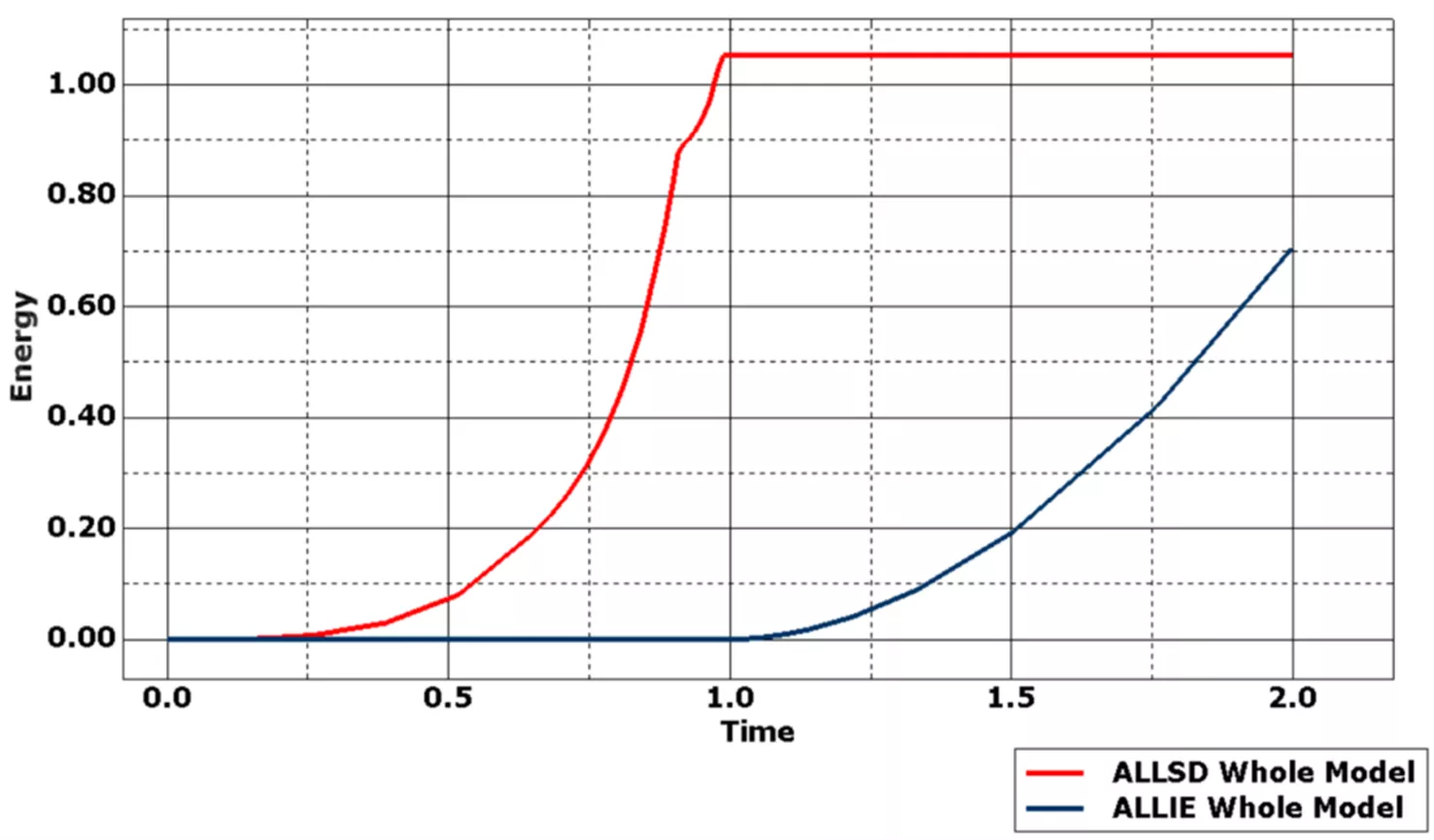
Figure 3
- Ajouter une étape pour établir le contactUne autre méthode pour réduire l'erreur due à la stabilisation et faciliter la convergence des modèles avec paires de contacts consiste à scinder l'étape de chargement en deux. Lors de la première étape, appliquez une stabilisation, mais avec une faible fraction (1 à 10 %) de la charge maximale. Le contact s'établit ainsi, rendant inutile la stabilisation à l'étape suivante, où la charge est augmentée progressivement jusqu'à sa valeur maximale. La figure 3 montre que l'énergie de stabilisation augmente lors de la première étape, mais reste constante lors de la seconde. Dans Abaqus/CAE, la configuration se fait comme suit :

Figure 4
Exemple illustratif des résultats obtenus grâce à l'application des recommandations
Pour mieux comprendre ces concepts, nous appliquerons ces recommandations à un modèle d'analyse simple (que nous appellerons modèle « A »). Ce modèle rencontre initialement des problèmes de convergence ou ne parvient pas à se résoudre. Les avertissements générés dans son fichier de messages sont présentés à la figure 1. Nous répartissons ensuite la charge appliquée en deux étapes et faisons varier le facteur de stabilisation automatique afin de réduire l'énergie de stabilisation. Ces modifications génèrent des variantes que nous appellerons les modèles « B » et « C ».
Pour suivre l’impact de ces recommandations et les variations de stabilisation, nous enregistrerons les paramètres d’entrée essentiels et les données de sortie observées dans le tableau ci-dessous :
| Mesures | Charger | Facteur de stabilisation automatique | ALLSD/ALLIE (%) | pic de stress | Stress maximal (%) | |
| UN | 1 | Étape 1 = 100 % | 1 | 13 725 % | 80,25 MPa | 97 % |
| B | 2 | Étape 1 = 1 % Étape 2 = 1-100 % |
1E-2 | 149 % | 82,59 MPa | 99,9 % |
| C | 2 | Étape 1 = 1 % Étape 2 = 1-100 % |
1E-8 | 0,27 % | 82,64 MPa | 100 % |
On constate que l'analyse de la ligne A ne comporte qu'une seule étape : la charge maximale est appliquée et une stabilisation automatique, avec un facteur de 1, est activée sur la paire de contacts. Le ratio ALLSD/ALLIE dans les résultats affiche une valeur de 13 725 %, dépassant largement la recommandation de 5 %.
Le modèle « B » comporte une deuxième étape : la charge appliquée représente 1 % de la charge totale lors de la première étape et passe à 100 % lors de la seconde. Le facteur de stabilisation est réduit à 1E-2 et appliqué seulement lors de la première étape. Le ratio ALLSD/ALLIE est de 149 %, inférieur à celui de l’analyse précédente, mais toujours supérieur à la recommandation de 5 %.
Nous apportons des modifications supplémentaires au modèle « C » : le facteur de stabilisation est réduit de 1E-2 à 1E-8. Par conséquent, le ratio ALLSD/ALLIE s’établit désormais à 0,27 %, nettement inférieur à la recommandation de 5 %. Le modèle « C » présentant le ratio ALLSD/ALLIE le plus faible, nous prévoyons que son comportement simulé sera plus proche de la réalité que celui des deux modèles précédents.
Il est également important de noter que la stabilisation introduit un effet d'amortissement, s'opposant aux mouvements relatifs incrémentaux entre les surfaces en contact. Même dans une analyse statique, le solveur effectue de petits incréments de déplacement sur de courts intervalles de pseudo-temps (le temps étant une grandeur non physique dans une analyse statique). Le temps pseudo permet de suivre la progression du solveur. Par conséquent, plus les déplacements relatifs incrémentaux sont importants durant ces incréments de pseudo-temps (ce qui équivaut à une vitesse relative plus élevée pour l'algorithme de stabilisation), plus la force d'amortissement artificielle appliquée pour cet incrément sera importante. Cela signifie que si vous exécutez le même modèle plusieurs fois en modifiant certaines caractéristiques, comme le frottement entre les surfaces de contact, différents niveaux de stabilisation peuvent être appliqués automatiquement, ce qui peut entraîner des effets incohérents sur les résultats, comme la contrainte maximale.
En conclusion, la stabilisation est un outil très puissant pour obtenir la convergence des problèmes statiques non linéaires. Il faut l'utiliser avec discernement afin d'assurer des résultats aussi réalistes que possible.
Prêt à vous lancer avec Abaqus ?Consultez notre guide d'achat Abaqus ou Contactez-nousN'hésitez pas à contacter les experts en simulation de GoEngineer pour trouver l'outil qui vous convient ! Si vous n'êtes pas encore prêt à utiliser Abaqus, vous pouvez tout de même profiter pleinement de ses avantages grâce à… Services-conseils en analyse par éléments finis (FEA) de GoEngineer.
Note de la rédaction : Cet article a été initialement publié en juin 2021 et a été mis à jour pour plus de précision et d'exhaustivité.
Articles connexes
Conseils de maillage Abaqus pour des résultats de contraintes précis
7 conseils Abaqus/CAE pour les nouveaux utilisateurs
Analyse par éléments finis des structures pour débutants : 5 étapes de la conception par simulation

À propos de Vikram Radhakrishnan
Vikram fait partie de l'équipe de simulation chez GoEngineer, où il aide les ingénieurs à exploiter les technologies de Dassault Systèmes pour résoudre des défis du monde réel. Avec près de deux décennies d'expérience dans les domaines de l'aérospatiale, de l'automobile, du maritime, de l'énergie et de la fabrication, il apporte une expertise approfondie en mécanique des structures, en multiphysique et en automatisation de l'ingénierie. En dehors du travail, vous le trouverez probablement à la table de tennis de table, en train d'affiner son revers.
Recevez notre vaste gamme de ressources techniques directement dans votre boîte de réception.
Désabonnez-vous à tout moment.