Getting a Grip with 3D Printing: Robotic Arm Project
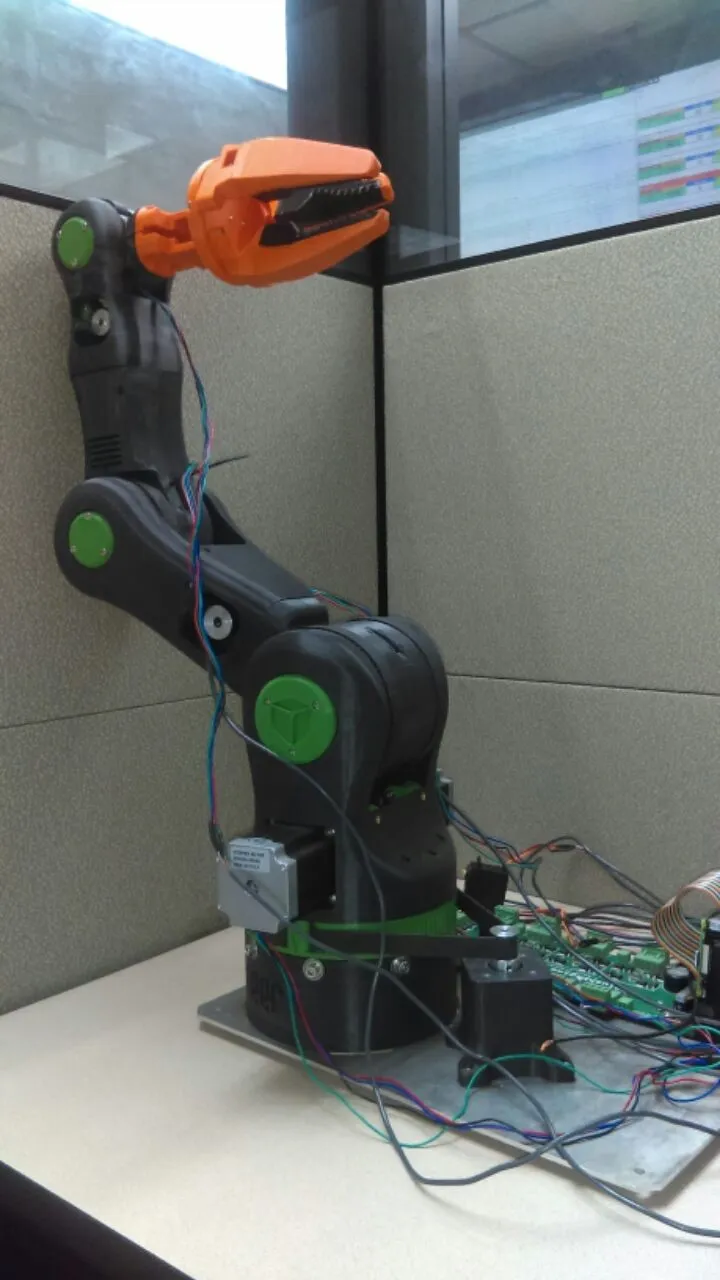
I acquired the Roboteurs RBX1 (Remix) robot arm from my colleague Preston Ruff who in a previous blog post, built and assembled the robot arm from a kit. The robot arm is a 6-axis robot with a pincer grip. Being an engineer and a fan of robots, I started to think of ways to improve the arm. The first thought that came to mind was that the gripper was simple and could be improved. So, I started to design improvements on my own.
The Design
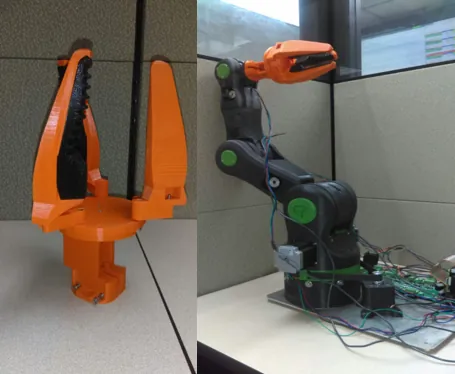
Some design changes I wanted to include were a 3-pronged design for a better grip and soft inner material to conform and grip items better. I started by designing the 3-pronged gripper. There were some limitations that I had to keep in mind. As the robot was made from a prefabricated kit, I did not want to design and fabricate a new PCB to accommodate a different gripper motor.
The original kit came with a prefabbed board and motors to be used in the assembly. With that known, I had to figure out a way for the three “fingers” to move simultaneously using the stepper motor from the original design. I overcame this limitation by changing the way the grippers closed around the object.
Instead of having them rotate inward around a perpendicular axis, I had them rotate around the center axis. This worked well but introduced different problems that I will need to address down the line. One such problem occurs when the object being picked up is not symmetrical and forces one of the fingers to stop rotating inwards. This will be addressed with a differential link. This link will allow for asymmetrical extensions to accommodate any irregular geometry.
Improvements Continued
With this out of the way, I had to look at how the gripper would mount to the arm. The original design had a wrist pin in the middle of the gripper between the side plates. With my design, the stepper motor would be located directly underneath the gripper and above the wrist pin. I did not want to alter the wrist pin in any way in case we wanted to use the old gripper in the future. I designed around this problem by making a mounting bracket that would sit above the pin.
The next obstacle to tackle was the soft inner pads of the fingers. The goal was to design a pad that would conform to the object being moved but have enough gripping force to be able to hold the object steady. The ideal setup would be a dual extrusion print that could print both materials at the same time creating one solid piece.
While this is possible, the time and expense would be too great until the gripper was proven to work. I had to print the hard-outer shell and the soft pads separately and glue them together. The pads were 3D printed out of a soft PLA filament. This material is softer than the ABS used to print the rest of the robot but is still stiffer than the desired material. I attempted to work around this by changing the pad's design from being solid to being hollowed out. This helped with the stiffness but did not meet the requirements that the softer material would.
The Next Steps
In the future, I plan to run simulations on the softer material to identify the ideal gripper pad material to get the best grip while still conforming to the material properly. Some parts will require a little redesign to negate some of the friction and resistance, the links will be updated to a differential design. With this updated gripper the original kinematics of the arm is no longer valid. I will need to calculate and program the new kinematics for the arm. Once that is complete other parts of the robot can be looked at for possible improvements.
More 3D Printing Design Hacks
3D Printed Redesign of Corvette C4 Gas Pedal Mount
3D Printed Trim Panel for Custom Shifters
![]()
About Nathen Blas
Nathen Blas is a SOLIDWORKS Technical Support Engineer based out of our Headquarters in Salt Lake City, Utah. He earned his Bachelor’s degree in Mechanical Engineering at the University of Utah in 2018 and joined the GoEngineer family that same year.
Get our wide array of technical resources delivered right to your inbox.
Unsubscribe at any time.